|
|
||
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|

|
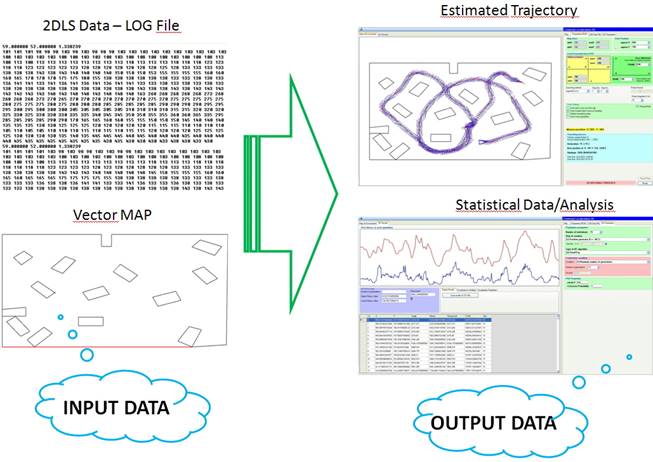
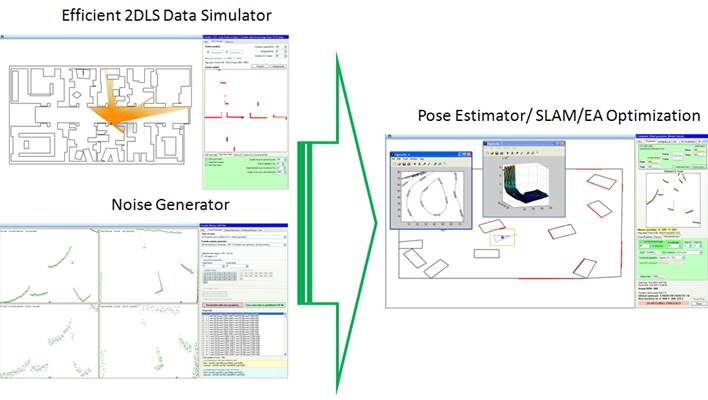
RobomapStudio(RS) is a smart tool permitting to process various data types in the field of autonomous robotics. (RS) works with vector data only. The main goal of this project is to provide an analytical tool capable of estimating possibilities of the robot navigation using 2DLS. The data from 2DLS can be obtained from real 2DLS Sick – Sick GmbH for example or from computer simulator. (RS) contains three powerful simulators. All computations proceed with geometric primitives – lines.
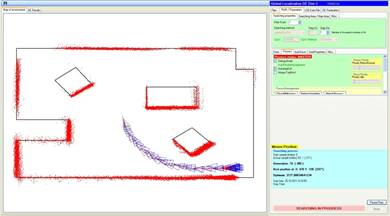
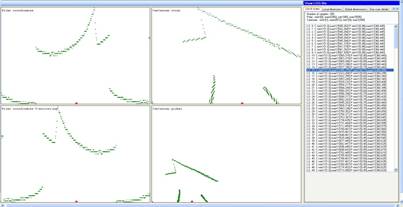
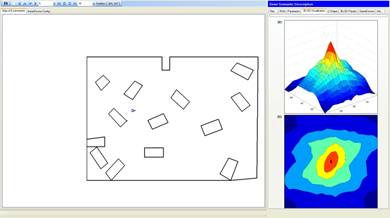
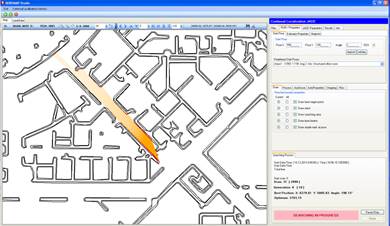
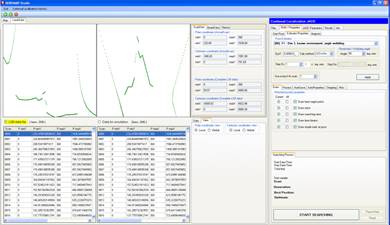
CONTINUAL LOCALIZATION AND GLOBAL LOCALIZATION IN A KNOWN ENVIRONMENT WITH OR WITHOUT MOVING OBJECTS CASCADED ESTIMATORS – MOVING OBJECTS DETECTION
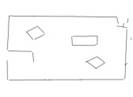
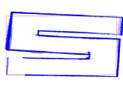
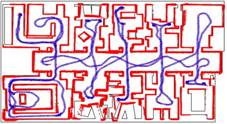
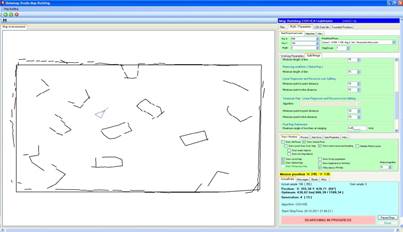
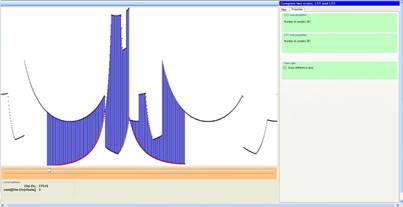
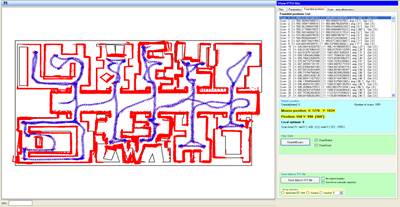
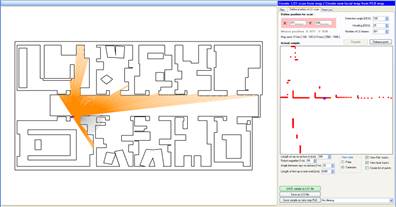
MAP BUILDING – gSLAM ALGORITHM, A SMALL ENVIRONMENT WITHOUT MOVING OBJECTS
The number of the geometric primitives is limited to approx. 100 lines if 1xCPU-AMD2.2GHz/Orleans is used. If number of the model lines is less than 60, computations can be real-time. The higher computing power provides possibility to use more lines. There are no constraining limits in the sense of the minimum grid resolution. (RS) uses universal measuring units - 1x1unit. Usually this unit is equal to 1cm (1x1cm or 2.5x2.5cm etc.) according to the 2D LS scale. The maximum size of environment is 32000x32000cm(units) for the internal map builder and 64000x64000cm(units) if the external map builder is used (AutoCAD+CSV for example). The maximum angle resolution is usually 0.5°, some parts of the (RS) use IEEE(double) resolution in heading. The number of rays of 2DLS can be changed. The recommended number of rays is 361 in 180°.
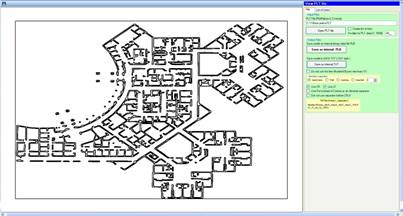
(RS) uses its own data-file formats. The map import or any suitable data format from 2DLS is possible using built-in tools. The acceptable map formats are TXT(CSV) or simplified PLT file format style. A bitmap picture can be traced. It is possible to import the data from AutoCAD due to the DXF, DWG, HPGL, DNG file type converter. All maps in this formats have to be inserted to internal tool and exported to HPGL-1(PLT) file type. (RS) does not use general HPGL-1 file format – simplified PLT format is used.
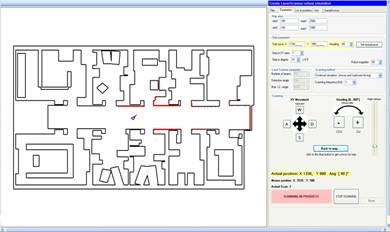
The most important results provided by (RS) can be stored in a special data-file type (PTH) and it can be used as a ‘playback’ later for better review. Thanks to several powerful 2DLS simulators, data from 2DLS can be simulated from the geometric map of environment and exported to TXT(CSV) file type. The first mentioned simulator uses a classic vector map representation. The second one uses a bitmap representation. This simulator has no restriction in the sense of the maximum recommended 2D dimensions.
The number of beams of the used 2DLS is set to 361 by default, but this setting can be changed into a different suitable value (90,180,270 etc.). The maximum detectable obstacle is set to 6000cm. This value can be changed, but 6000cm is a recommended value for all experiments. (RS) uses MATLAB tool at visualization. Version 5.4 was used at development time, but this version can be replaced by any of the new version of this software. All necessary configuration information can be found in the configuration file.
(RS) is capable to provide localization scheme using ‘point-to-point’ and ‘point-to-line’ methodology. Evolutionary algorithms such as SGA, MonteCarlo, DE, PSO, RPSO, CMAES can be used as a computation accelerator. Identical tools are provided for global localization. The significant part of the (RS) is cascaded pose estimators. Brute force and the classic gradient (hill climbing) method can be used. Evolutionary computation methods are a very powerful tool. The cascaded estimators use these algorithms as an accelerator too. (RS) contains all necessary viewers for all internal file types and beside this, CSV file type is supported too. (RS) is equipped by suitable tools for bulk data processing. It contains easy multi-process management service capable of launching and controlling many (RS) instances. Thanks to the auto-priority scheduler all instances can run at once. Output data provided by (RS) can be directly processed in MS Excel or similar programs. All resulting data are in TXT format with fix syntax. MSSQL language can be used in MS Excel to data post-process. Auto-save at the end of bulk-data-process and auto-exit function with the sound signal is provided too. Almost all parts of the (RS) provide a possibility to save actual working parameters setting and use these data later.
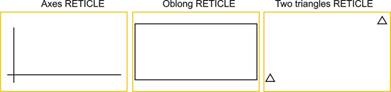
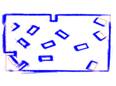
(RS) contains several modules for Simultaneous Localization and Mapping (SLAM). The basic module is so called ‘GeometricSLAM’. This module uses geometric primitives only. It is suitable for small indoor office environment. SLAM only uses one information source: 2DLS. gSLAM is very sensitive to correct setting of the working parameters. Unfortunately, identical setting for different types of environments was not found. Open areas with several static objects – it is more suitable environment. The base condition for successful map building is that all beams reflect walls. In large environment, some beams can’t be used because max. LS range is usually 5-8meters. Longer beams can be marked automatically in SLAM module (before start) according to the predefined beam-length. Such beams will not to be used for SLAM process. ‘GeometricSLAM’ is very sensitive to the lack of beams in scan. Large absence of beams can lead to SLAM malfunction. For algorithmic simplification, the map of environment is necessary too. Such map defines min/max coordinates only. Map can be replaced by ‘reticle’ with appropriate dimensions. ‘Reticle’ defines min/max coordinates as well. Oblong ‘reticle’ is strongly recommended. ‘Reticle’ encloses the map and defines the min/max coordinates. Possible formats:
SLAM can use classic brute force/gradient mechanism or EA computation (simple EA or cascaded EA estimator). The nenu is divided into several ‘tabPages’. Simple EA estimator (tabPage ‘Scanner’ is activated only) is able to build most of all small office environments. Cascaded EA estimator can be used too. This ‘power-machine’ is very sensitive to the correct setting, but provides good results in suitable types of environments. (RS) SLAM builder is suitable to the environment without moving objects. gSLAM algorithm presented in (RS) does not use closing-loop technique at this time and data from 2DLS are used only – no KalmanFilter and odometry information are incorporated into gSLAM.
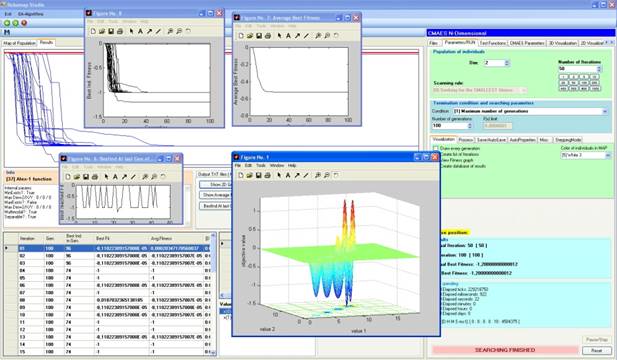
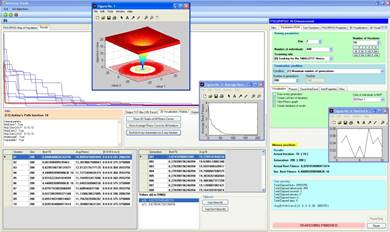
Evolutionary computations are a significant part of the (RS). More than 50 standard benchmark functions can be tested in many different configurations. More than 300Dim functions can be tested (nonscalable multidimensional testing). Used algorithm is able to repeat all tests and compute average values from for example 10000 repeating of the selected EA function(s). EA module has built-in auto-priority scheduler. Thanks to this feature many different functions can be tested at once. All functions can be visualized in its 3Dim version thanks to the Matlab visualization tool. MonteCarlo is a sub-part of SGA, aGA and DE optimizers. All modules provide video creation functions. Two dimensional EA- module cooperate with the global localization module and use GAB file format to simulate behavior of the SGA, aGA, PSO, RPSO optimizers at a global robot localization problem.
To avoid using the classic and complicated job-scheduler, (RS) has a simplified priority-master/slave scheduler system. If results in the bulk-data processing style are required, this scheduler provides a great helper. Once ‘master’ module is running and paused by ‘stop/pause’ button, many other modules can be run in ‘iddle’ mode simultaneously. ‘Master’ or ‘Iddle’ mode is set automatically. Last step is to set the ‘master’ module to the working condition. The priority level can be set by user in the classic Windows 5-levels style. A simple process administrator is attached in ‘Process/ProcessManagement’ menu.
|
||||||



|
Robomap Studio |
||||
|
System |
Version / Platform / File type / Size |
Description |
Download |
|
|
ROBOMAP Studio full x32
|
1: v1.01062020 2: v1.01062020 3: v1.01062020
Windows XP, 7, 8, 10, 11 / RAR or ZIP file / 246 MB
|
RobomapStudio (RS) full version
Data files Converters, Data files Viewers, CAD-like vector-Map Builders, Two universal 2DLS Simulators – small and large maps, Automatic 2DLS scan generation using CSV/TXT pose data in vector map, Start Pose Estimators, Continual localization, Gradient and Evolutionary Cascaded Pose Estimators, Global localization, Simultaneous Localization and Mapping – vector gSLAM, SLAM with cascaded estimator, Semi-Semantic Classification of a Known Environment, N-dimensional non-scalable EA computations, available optimizers: SGA, aGA, MonteCarlo, DE, JADE, JDE, EPSDE, SADE, SANSDE, PSO, RPSO, pureCMA-ES, the simulator contains 67 benchmark functions, Extended noise maker with fixed or percentage share of selected band-width, AutoPriority Scheduler for bulk data processing, Process Management, AutoSave Abilities, Output Statistics, Data format suitable for MS Excel, latest gSLAM source code, pureCMA-ES, C++/CLI source code, several examples of the gSLAM, continual and global localization and user manual.
‘ROBOMAP Studio - Subsidiary Tools’ is necessary for all 2DLS simulators for Windows 32bit and 64bit. (RS) VMWare image contains “(RS) x32” and all necessary tools ready to run + complete data repository and examples.
|
1: Download 2: Download 3: Download
|
|
|
ROBOMAP Studio full x64 |
1: v1.11102015 2: v1.11102015 3: v1.09102012
Windows XP, 7, 8 - x64 / RAR or ZIP file / 295 MB
|
1: Download 2: Download 3: Download
|
||
|
ROBOMAP Studio full x32 (RS) ready to run under Win7x32. Complete system + examples. All-in-one in a VMWare image.
Use Free VMWare Player or latest VMWare Pro for Windows or Linux or you can directly download the installer see bellow.
If you want to use the latest version of the (RS), please, download the “(RS) full x32” and rewrite by it the older version in the VMWare image. The VMWare image containing W7x32 (10.73 GB) is the most recommended. |
1: v1.09102012 2: v1.09102012
Windows XP x32, Vista, Linux* 32+64bit / RAR file / 2.11 GB Image for Windows and Linux for VMWare 6.x – 10.x
|
1: Download 2: Download
|
||
|
1: v1.01062020 2: v1.01062020
Windows 7, 8, 10, 11, Linux* 32+64bit / RAR file / 10.73 GB Image for Win 7, 8 and 10 for VMWare 12.x - 17.x and later versions
|
1: Download 2: Download
|
|||
|
*tested: Fedora, RedHat, Debian, Ubuntu, SuSe, Mandriva
|
|
|||
|
LINUX |
WINDOWS |
|||
|
Data processing tool Navigation data |
1: v1.09102012 2: v1.09102012 3: v1.09102012 Windows XP 32 bit / ZIP file / 35.2 MB |
VBA Script + MS SQL 8.0 based data processing tool for MS Excel 2007
|
1: Download 2: Download 3: Download |
|
|
Data processing tool Data from EA calculation |
1: v1.09102012 2: v1.09102012 3: v1.09102012 Windows XP 32 bit / ZIP file / 35.2 MB |
VBA Script + MS SQL 8.0 based data processing tool for MS Excel 2007
|
1: Download 2: Download 3: Download |
|
|
ROBOMAP Studio Subsidiary Tools |
1: v1.09102012 2: v1.09102012 3: v1.09102012
Windows 32 bit, 64bit / ZIP file / 1.32 GB
|
All necessary prerequisites for Windows 32bit and 64bit. Windows Installer 3.1, .NET libraries 2.0+3.5 SP1, SlimDX v2.0 March 2011, MS Visual Studio 2008 redistributable package SP1 (1:link,2:link), NMath 5.2 numerical library + some useful sw.
|
1: Download 2: Download 3: Download
|
|
|
SlimDX Runtime Libraries |
1: v1.07112014 2: v1.07112014 3: v1.07112014
Windows 32 bit, 64bit / ZIP file / 0.50 GB
|
A package of SlimDX Runtime libraries |
2: Download 3: Download
|
|
|
VMWare Workstation |
1: v1.18062024 2: v1.18062024
|
A package of VMWare Workstation installers for Windows. Version 7.1.14 – 17.5.2. For new project(s) use Proxmox or VirtualPC etc. because the VMWare project was canceled.
|
1: Download 2: Download
|
|
|
|
|
|
|
|
|
ROBOMAP Studio - gSLAM ‘gSLAM source code‘ GNU license FREE |
1: v 1.02092011 2: v 1.02092011 3: v 1.02092011 Windows XP 32 bit / ZIP file / 137.5 KB |
Simultaneous Localization and Mapping (Geometric SLAM). Source Code for MS VS C++/CLI 2008 SP1 (.Net 3.5 SP1) Source Code depends on correct (RS) main directory structure – i.e. BMP, RTF, ICO files, Windows registry information, main CFG file etc. You have to download (RS) full version and to install all subsidiary files first !!! |
1: Download 2: Download 3: Download
|
|
|
ROBOMAP Studio full ‘Complete source code‘ GNU license |
1: v1.01062020 2: v1.01062020 3: v1.01062020 Windows / ZIP file / 19.7MB |
Complete Source Code for MS-VS-2008-SP1 C++/CLI Source Code depends on correct (RS) main directory structure – i.e. BMP, RTF, ICO files, Windows registry information, main CFG file etc. You have to download (RS) full version and to install all subsidiary files first !!!
|
1: Download 2: Download 3: Download |
|
|
|
|
|
|
|
|
Key: 1: https://fastshare.cz/ , 2: https://figshare.com/, 3: https://onedrive.live.com. All used cloud services are free cloud data storage services. There is no 24x7 guarantee. There is absolutely no guarantee. Maybe it will work, maybe not. Keep smile and be happy - life is short :-)
(RS) is free project. If you need any changes or adds-on, you have to pay for it :-) - money talks. ‘ROBOMAP Studio full x32’ is single threaded application (x64 too). Version date key: ddmmyyyy.
The best way, how to use (RS) is A/ to install the latest version “ROBOMAP Studio full x32” from site 1: (e.g. v1.01062020) and use it under Windows 7 x32 (classic theme) or Win 8.x, Win 10, Win 11 or latest suitable version or B/ to download “VMWare Player” or “VMWare Workstation Pro” and (RS) VMWare Image for VMWare 12 or later and use (RS) in connection with VMWare (versions 12, … , 17 or later version) under Windows 10, 11, etc. or Linux. If there is no up-to-date version of (RS) inside the VMWare image overwrite the old version with newest/latest version of “ROBOMAP Studio full x32” from site 1:. Note: As the VMWare project was unfortunately canceled the Proxmox.com is suitable replacement. |
||||
|
Data Repository |
||
|
Description |
Content |
Download |
|
Data from real 2DLS Sick PLS100 Sick gmbh, 361beams/180° Complete package + adds-on something. 133.60 MBytes |
(REF0001) 1: v 1.10112011 2: v 1.10112011 3: v 1.10112011
13 common office environments built-up by paper cardboard boxes, LOG files, PLB map, LSB data, screenshots, LAY files. No odometry data.
|
1: Download 2: Download 3: Download
|
|
Data from real 2DLS Sick PLS100 Sick gmbh, 361beams/180° Global Localization experiments Continual Localization experiments 3.40 MBytes |
(REF0001) 1: v 1.10112011 2: v 1.10112011 3: v 1.10112011
4 common office environments built-up by paper cardboard boxes, PLB map, LSB data, screenshots. No odometry data.
|
1: Download 2: Download 3: Download
|
|
Data from RADISH repository. Selected large environments. 51.40 MBytes |
(REF0001) 1: v 1.10112011 2: v 1.10112011 3: v 1.10112011
Selected large environments, not very suitable for (RS) geometric SLAM. Without PLB files. LSB data only. PLB ‘reticle’ (frame) must be created in (RS). http://cres.usc.edu/radishrepository/view-all.php
|
1: Download 2: Download 3: Download
|
|
Data from real 2DLS Sick PLS100 Sick gmbh, 361beams/180° Data suitable for SLAM experiments with correct pose estimator setting. 41.01 MBytes |
(REF0001) 1: v 1.05122011 2: v 1.05122011 3: v 1.05122011
6 simple and common office environments with suitable estimator setting. PLB ‘reticle’, LSB data, screenshots, estimated path, messages, solved examples.
|
1: Download 2: Download 3: Download
|
|
Data from 2DLS Sick PLS100 was obtained in environment built-up by classic paper cardboard boxes with different dimensions. |
||



|
ROBOMAP Studio (v1.0) Copyright © 2011 J.Moravec Contributors: S.K. Mishra, Petr Pošík
‚ROBOMAP Studio’ software is distributed WITHOUT ANY WARRANTY.
‘ROBOMAP Studio’ is GNU (General Public License) and is free software. ‘SLAM source code’ (gSLAM algorithm) of the ‘ROBOMAP Studio’ is GNU (General Public License) and is free software.
You can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version. This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details. You should have received a copy of the GNU General Public License along with this program. If not, see <http://www.gnu.org/licenses/>.
THERE IS NO WARRANTY FOR THE PROGRAM, TO THE EXTENT PERMITTED BY APPLICABLE LAW. EXCEPT WHEN OTHERWISE STATED IN WRITING THE COPYRIGHT HOLDERS AND/OR OTHER PARTIES PROVIDE THE PROGRAM “AS IS” WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. THE ENTIRE RISK AS TO THE QUALITY AND PERFORMANCE OF THE PROGRAM IS WITH YOU. SHOULD THE PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF ALL NECESSARY SERVICING, REPAIR OR CORRECTION.
IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING WILL ANY COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MODIFIES AND/OR CONVEYS THE PROGRAM AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES, INCLUDING ANY GENERAL, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING OUT OF THE USE OR INABILITY TO USE THE PROGRAM (INCLUDING BUT NOT LIMITED TO LOSS OF DATA OR DATA BEING RENDERED INACCURATE OR LOSSES SUSTAINED BY YOU OR THIRD PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH ANY OTHER PROGRAMS), EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES.
Because (RS) is absolutely free you can do with it anything you want. For example you can throw it to trash or you can use it as a beer mat.
|
|
(RS) version detection |
Deployment and installation of the RobomapStudio parts: |
|
All versions have ID_number in main (RS) directory. Something like _RSv1.20112011 alias _RSv#.DDMMYYY, where # is actual version, DDMMYYY is day of the month(DD), month(MM) and year(YYYY) of last update (date in European format). |
(RS) is divided into several standalone parts with one main exe module. All standalone modules need (RS) directory structure and all RTF, BMP etc. files, included to this directory structure. Main (RS) module and all standalone modules have identical name ‘ROBOMAP.EXE’ because of the simple priority scheduler is used instead of a classic job scheduler. Correct deployment of these files is important. Every standalone module can run without existence of the main module or any other module(s). |
|
(RS) Installation instruction |
Subsidiary tools required for RobomapStudio x32 for Windows XP 32bit: |
|
ROBOMAP Studio has no full installer at this time. Follow these instructions:
0. Install all subsidiary tools. If it is necessary. 1. Create suitable directory manually ... 'C:\ROBOMAP' for example (it is recommended). 2. Copy content of ZIPpped file to the directory - 'C:\ROBOMAP'. 3. Run Install.exe file in 'C:\ROBOMAP' directory. 4. Select ROBOMAP working directory - 'C:\ROBOMAP' for example (it is recommended). 5. Select visualization tool. Matlab is recommended. 'C:\Program Files\MatlabR2010\bin\matlab.exe' for example. 6. Enable digitizer HP7475A, this setting enables to create and to export the new geometric maps. 7. Press 'INSTALL' button – and hope. 8. (RS) main working window(s) resolution can be changed in menu (RS): [Edit\Convert] \ [EditConfigDataFile]
Recommended monitor resolution is 1680x1050. |
RobomapStudio ALL versions require minimally Windows XP 32bit SP2 (installation sequence may be important):
1/ MS Installer 3.1 or higher(according to the Windows version) 2/ .NET2.0 library +.NET2.0 library Service Pack 2 (base package) 3/ .NET3.5 library + .NET3.5 library SP1 4/ SlimDX SDK library 2.xx, March 2011 (must be installed first)* 5/ SlimDX SDK library, September 2011 6/ MS VC++ 2008 SP1 redistributable package. 7/ MS VC++ 2010 SP1 redistributable package (required by NMath 5.2) 8/ Matlab version 5.0 or higher. (v.2009 was tested OK) 9/ NMath library 5.2 for Win x32, x64, XP,Vista,7,8 + use StudentLicenseKey
All components (subsidiary tools) must be installed manually. See ‘SubsidiaryTools’ Readme.txt file for more detailed information.
|
|
*(RS) uses some DLLs from SlimDX March 2011 and some from September 2011. So you need both versions. If 64bit Windows is concerned, .NET 4.0 Full version have to be installed, Client Profile version only is not enough. SlimDX SDK is required as well. By the way, (RS) uses ‘comma’ as a decimal separator. Some Windows - US versions use dot. To correct this problem, you have to change local setting in windows ControlPanel folder: LocalAndLanguagesSettings. |
|
|
ROBOMAP Studio - Function List (Menu system) |
|
|
[00.00.01] File
[00.01.01] File / CreateProjectDescription [00.02.01] File / Exit
[00.00.02] Edit/Convert
[00.01.02] Edit/Convert / Edit Config Data File [00.02.02] Edit/Convert / Convert Laser Data to LSB [00.03.02] Edit/Convert / Edit PLT File (Run PlotMaker2.2 CZE) [00.04.02] Edit/Convert / Edit PLT File (Run PlotMaker9.0 ENG) [00.05.02] Edit/Convert / StartPoses Edit
[00.00.03] View/Create
[00.01.03] View/Create / View LOG file / Create PLB, LSB, LS1 [00.02.03] View/Create / View PLT file (PlotMaker2.2) / Create PLB map [00.03.03] View/Create / View CSV, TXT / Create PLB, BIN [00.04.03] View/Create / Create LS1 scan from PLB model / PLB, LS3 [00.05.03] View/Create / Create LS Simulation ( Mouse, Keyb, Tablet ) [00.06.03] View/Create / 2D LS Simulator (Vector)( GamePad ) [00.07.03] View/Create / 2D LS Simulator (Bitmap)( GamePad ) [00.08.03] View/Create / Create Noisy LSB [00.09.03] View/Create / View LSB file / Create PLB, LSB, LS1 [00.10.03] View/Create / View PLB file (map of environment) [00.11.03] View/Create / View LS1 file (one scan) [00.12.03] View/Create / View PTH file (data from localization) [00.13.03] View/Create / View VRX file (data from global localization) [00.14.03] View/Create / View GAB file (data to GA searching) [00.15.03] View/Create / Compare two scans, LS3 and LS1
[00.00.04] ComputeStartPose
[00.01.04] ComputeStartPose / Compute position by hand [00.02.04] ComputeStartPose / Compute Start Position 1 (1pass,BruteForce,Visual) [00.03.04] ComputeStartPose / Compute Start Position 2 (2pass,BruteForce) [00.04.04] ComputeStartPose / Compute Start Position COX 1 (BruteForce,Visual)
[00.00.05] ContinualLocalization
[00.01.05] ContinualLocalization / Continual Localization 1 (Brute force) [00.02.05] ContinualLocalization / Continual Localization 2 (HillClimbing) [00.03.05] ContinualLocalization / Continual Localizaion SGA/aGA 1 [00.04.05] ContinualLocalization / Continual Localization PSO 1 [00.05.05] ContinualLocalization / Continual Localization RPSO 1 [00.06.05] ContinualLocalization / Continual Localization DE 1 [00.07.05] ContinualLocalization / Continual Localization JADE (2D/3D) [00.08.05] ContinualLocalization / Continual Localization jDE (2D/3D) [00.09.05] ContinualLocalization / Continual Localization DE 2 (3D) [00.10.05] ContinualLocalization / Continual Localization COX
[00.00.06] CascadedEstimators
[00.01.06] CascadedEstimators / Gradient F1,2,3 (CL1+CL2+COX) [00.02.06] CascadedEstimators / EA + F1,2,3
|
[00.00.07] GlobalLocalization
[00.01.07] GlobalLocalization / Global Localization 1 (Brute Force) [00.02.07] GlobalLocalization / Global Localization SGA/aGA 1 [00.03.07] GlobalLocalization / Global Localization PSO/RPSO 1 [00.04.07] GlobalLocalization / Global Localization DE 1 (2D) [00.05.07] GlobalLocalization / Global Localization DE 2 (3D) [00.06.07] GlobalLocalization / Global Localization DE 3 (6D) [00.07.07] GlobalLocalization / Global Localization CMAES 1 (2D) [00.08.07] GlobalLocalization / Global Localization COX BF 1 [00.09.07] GlobalLocalization / Global Localization COX SGA/aGA 1 [00.10.07] GlobalLocalization / Global Localization COX DE 1 [00.11.07] GlobalLocalization / Global Localization COX PSO/RPSO 1
[00.00.08] MapBuilding
[00.01.08] MapBuilding / Map Building Simple (Vector) - Geometric SLAM [00.02.08] MapBuilding / Map Building (Vector)
[01.02.08] MapBuilding / Map Building (Vector) / Map Building F3+Vector+EA+subframe [02.02.08] MapBuilding / Map Building (Vector) / Map Building F3+Vector+EA full [03.02.08] MapBuilding / Map Building (Vector) / Map Building COX+DE+subframe [04.02.08] MapBuilding / Map Building (Vector) / Map Building COX+DE full [05.02.08] MapBuilding / Map Building (Vector) / Line Map Building (Crowley) [not accessible] [06.02.08] MapBuilding / Map Building (Vector) / LineFitting
[00.03.08] MapBuilding / Map Building (Bitmap)
[01.03.08] MapBuilding / Map Building (Bitmap) / Map Building (1/0 Occupancy Grid) [incomplete] [02.03.08] MapBuilding / Map Building (Bitmap) / Map Building (CEE, 1/0 Occupancy Grid) [incomplete]
[00.04.08] MapBuilding / Map Building (BF+SubmapBinding)
[00.00.09] Semantic
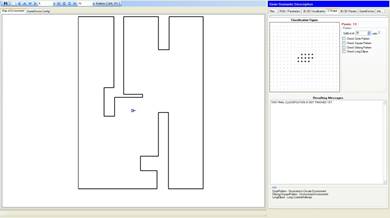
[00.01.09] Semantic / Semi-Semantic Classification of a Known Environment
[00.00.10] EvolutionaryAlgorithms
[00.01.10] EvolutionaryAlgorithms / SGA N-dimensional [00.02.10] EvolutionaryAlgorithms / aGA N-dimensional [00.03.10] EvolutionaryAlgorithms / DE N-dimensional [00.04.10] EvolutionaryAlgorithms / JADE N-dimensional [00.05.10] EvolutionaryAlgorithms / JADE N-dimensional [00.06.10] EvolutionaryAlgorithms / SPDE N-dimensional [00.07.10] EvolutionaryAlgorithms / PSO/RPSO N-dimensional [00.08.10] EvolutionaryAlgorithms / CMAES N-dimensional [00.09.10] EvolutionaryAlgorithms / SGA/aGA Optimizer ( dim 2 ) [00.10.10] EvolutionaryAlgorithms / PSO/RPSO Optimizer ( dim 2 ) [00.11.10] EvolutionaryAlgorithms / EEv N-Dimensional [incomplete]
[00.00.11] Process
[00.01.11] Process / Process Management
[00.00.12] Help
|
|
Algorithms marked as “[incomplete]” (alias gray colored) are not finished yet and can be unstable. |
|
|
Subsidiary Tools |
|||
|
System |
Platform |
Link |
Status |
|
Microsoft .NET 2.0 SP2 |
Windows XP |
https://www.microsoft.com/cs-cz/download/details.aspx?id=5913 |
Free |
|
Microsoft .NET 3.5 SP1 |
Windows XP |
Free |
|
|
Windows Installer 3.1 |
Windows XP |
Free |
|
|
SlimDX SDK 2.0 March 2011 |
Windows XP, Vista, 7, 8 |
Free |
|
|
Microsoft Visual C++ 2008 SP1 Redistributable Package |
Windows XP, Vista, 7, 8 |
https://learn.microsoft.com/en-us/cpp/windows/latest-supported-vc-redist?view=msvc-170 |
Free |
|
Microsoft Visual C++ 2010 Redistributable Package |
Windows XP, Vista, 7, 8 |
https://learn.microsoft.com/en-us/cpp/windows/latest-supported-vc-redist?view=msvc-170 |
Free |
|
Matlab - Student version |
Windows XP, Vista, 7, 8 |
http://www.mathworks.com/products/matlab/tryit_b.html http://www.mathworks.com/academia/student_version/faq/index.html |
Free |
|
Octave |
Windows XP, Vista, 7, 8 |
Free |
|
|
AutoCAD |
Windows XP, Vista, 7, 8 |
Not Free |
|
|
ABViewer 7 |
Windows XP, Vista, 7, 8 |
Not Free |
|
|
ArchiCAD |
Windows XP, Vista, 7, 8 |
Not Free |
|
|
Iridium - Math.NET Numerics |
Windows XP, Vista, 7, 8 |
Free |
|
|
Center Space NMath Library |
Windows XP, Vista, 7, 8 |
Not Free |
|
|
VMWare Workstation |
Windows XP, Vista, 7, 8 |
Free |
|
|
VMWare Player |
Windows XP, Vista, 7, 8 |
Free |
|
|
|
|
|
|
|
See also “subsidiary tools” for programs listed above. Suitable replacement for abandoned VMWare is Proxmox. |
|||
|
|
|
|
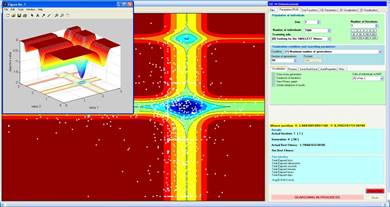
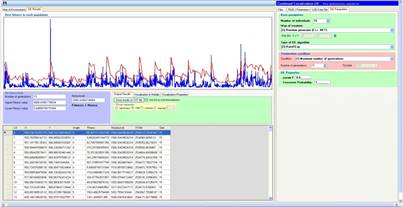
Global localization, three dimensional problem, DE optimizer |
Map of Environment Viewer - Wesley Woods geriatric Hospital Clifton USA |
|
|
|
|
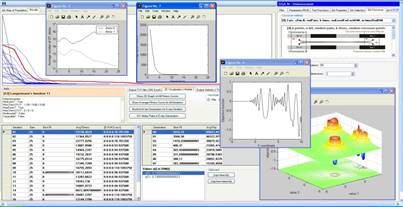
N-dimensional optimization, RPSO optimizer, Ackley’s path function |
SLAM – Cox’s pose estimator is used |
|
|
|
|
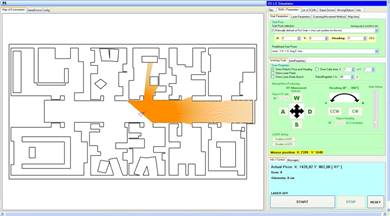
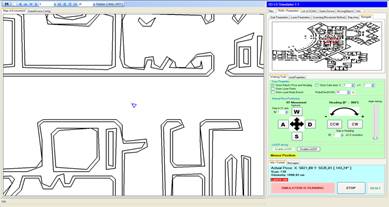
2DLaser Simulator (Vector); Keyboard + Mouse + Tablet Mode |
SLAM – evolutionary F3 estimator is used (Differential evolution) |
|
|
|
|
2DLaser Simulator (Vector); II. Generation – GamePad + JoyStick |
The result of classification - Viewer – Find correct pose in environment |
|
|
|
|
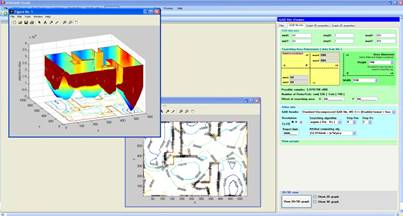
VRX file visualization – Level viewer |
LOG File Viewer & Converter |
|
|
|
|
N-dimensional optimization, DE optimizer, Michalewicz's function |
N-dimensional optimization, SGA optimizer |
|
|
|
|
Noise simulator |
Scan Comparator |
|
|
|
|
2pass, BruteForce Global Robot Localization |
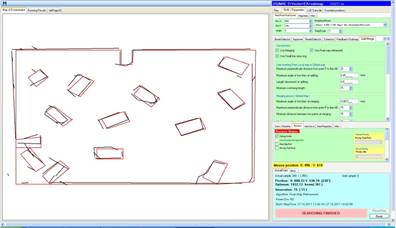
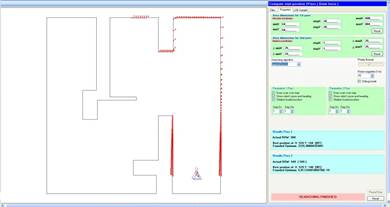
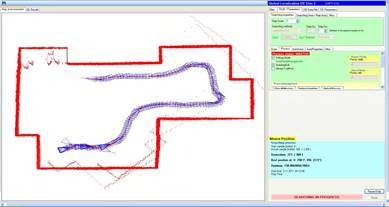
Precise Start Pose Estimator with visualization |
|
|
|
|
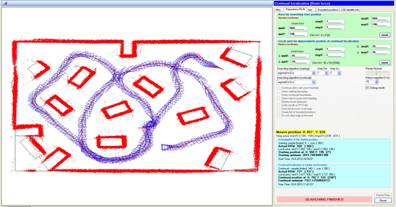
Continual Localization – DE; estimated path |
Continual Localization – DE; results |
|
|
|
|
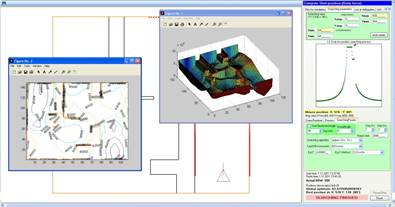
Global localization; DE 3Dim optimization problem; POP=GEN=300;10x10m |
Continual Localization in Known environment |
|
|
|
|
2DLaser Simulator (Bitmap); II. Generation – GamePad + JoyStick |
PTH File Viewer; result of the SLAM process; memorized positions |
|
|
|
|
N-dimensional optimization, DE optimizer, DeJong's function |
N-dimensional optimization, RPSO optimizer, Rastrigin's function |
|
|
|
|
Two Dimensional Cascaded Evolutionary Estimator - DE optimizer |
Simple Scan Generator |
|
|
|
|
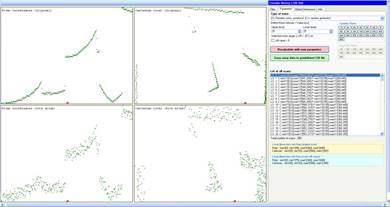
Semi-Semantic Classification of a Known Environment – Defining Hyperplane |
Semi-Semantic Classification of a Known Environment – 2D Peak Classification |
|
|
|
|
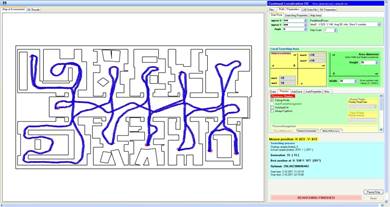
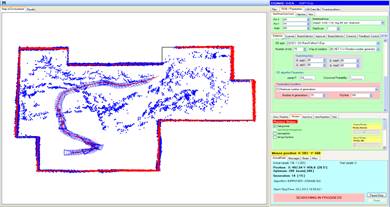
Continual localization F1,2,3 Estimators, 3Dim JADE optimizer, large environments |
Continual localization F1,2,3 Estimators, 2Dim JADE optimizer, large environments |
|
|
|
|
|
|
|
|
|
|
ROBOTICS AREA |
||
|
|
|
|
|
|
OPENSLAM - SLAM algorithms database etc. |
|
|
|
Robot Operating System WEB site |
|
|
|
Czech Republic - robotika WEB |
|
|
|
|
|
|
|
Dieter Fox ‘Probabilistic Robotics’, localization, SLAM, 2D,3D |
|
|
|
Sebastian Thrun ‘Probabilistic Robotics’, localization, SLAM, 2D,3D |
|
|
|
Cyrill Stachniss Database – repository, SLAM, robotics |
|
|
|
Carmen SW Carnegie Mellon Robot Navigation Toolkit |
http://carmen.sourceforge.net/home.html http://carmen.sourceforge.net/home.html |
|
|
Tim Bailey SLAM, Kalman Filter, general survey |
|
|
|
Kai Arras SLAM, Kalman Filter, general survey The CAS Robot Navigation Toolbox |
|
|
|
|
|
|
|
Arthur Guez SLAM |
|
|
|
Kris Beevers SLAM |
|
|
|
Chieh-Chih (Bob) Wang SLAM |
|
|
|
Luz Abril Torres-Méndez Visual navigation |
|
|
|
Gregory Dudek - robotics |
|
|
|
Albert Diosi SLAM |
|
|
|
Dorit Borrmann 6D SLAM |
http://www-lehre.inf.uos.de/~dborrman/ http://www7.informatik.uni-wuerzburg.de/mitarbeiter/dr-dorit-borrmann/ |
|
|
IIIT India – robotics laboratory |
|
|
|
University Carlos III Madrid, Spain Moreno, Munoz, Blanco, Garrido |
|
|
|
Marco Porta Visual robotics |
|
|
|
Miguel Torres Torriti PONTIFICIA UNIVERSIDAD CATOLICA DE CHILE Robotics laboratory - Spain robotics |
|
|
|
Michael Milford RAT SLAM |
|
|
|
Mike Bosse, CSIRO SLAM |
|
|
|
Damien P. George SLAM |
|
|
|
ParisTech CoreBots, CoreSLAM |
http://www.mines-paristech.eu/Researcher/Fields-of-Research/Mathematics-and-systems/CRI/ |
|
|
Samuel T. Pfister – California Institute of Technology SLAM |
|
|
|
Andrzej Pronobis |
|
|
|
Jose A. Castellanos SLAM, 2D,3D Lasr, Vision, Line segmentation |
|
|
|
6DOF SLAM,2D,3D Laser, SLAM, Line Segmentation, Vision |
|
|
|
Jason O'Kane, general robotics |
|
|
|
IEPF algorithm DEMO |
http://cgm.cs.mcgill.ca/~godfried/teaching/projects97/guirlyn/iterEndPoints/frames.html |
|
|
Richard O. Duda, IEPF and Line Tracking algorithm Richard O. Duda and Peter E. Hart. Pattern Classification and Scene Analysis. Wiley-Interscience, 1976. |
|
|
|
Alexander Gelbukh, Sulema Torres, Itzamá López (Eds.) Congres on Computations |
|
|
|
John J. Leonard SLAM, localization, navigation |
http://groups.csail.mit.edu/marine/wiki/index.php?title=Main_Page |
|
|
Interesting SLAM paper repository |
|
|
|
Henrik I. Christensen General robotics |
|
|
|
COLD Database |
|
|
|
Patric Jensfelt |
|
|
|
Cognitive Maps |
|
|
|
Cognitive Maps |
http://www.aut.ac.nz/research/research-institutes/cair/robotics |
|
|
Robot Operating System |
|
|
|
RobotVisionGroup |
|
|
|
Steven Lovegrove Real-time Spherical Mosaicing Using Whole Image Alignment |
|
|
|
Robo Vision |
|
|
|
OpenSource Bayesian Filtering Classes |
|
|
|
Christian Doppler Laboratory, SLAM |
|
|
|
Kristopher R. Beevers |
|
|
|
Velodyne SLAM - Dataset |
http://www.mrt.kit.edu/z/publ/download/velodyneslam/dataset.html |
|
|
Kurt Konolige, SLAM |
|
|
|
Point Cloud Library |
|
|
|
Willow Garage |
|
|
|
ARC Centre of Excellence for Autonomous Systems, University Of Sydney Australia |
|
|
|
Clustering algorithms |
http://home.dei.polimi.it/matteucc/Clustering/tutorial_html/index.html |
|
|
Karto Robotics SLAM |
|
|
|
Idaho National laboratory |
|
|
|
Radu B. Rusu |
|
|
|
Philippe Fraisse |
|
|
|
Wang Han |
http://www3.ntu.edu.sg/home/hw/ http://research.ntu.edu.sg/expertise/academicprofile/pages/StaffProfile.aspx?ST_EMAILID=hw |
|
|
Ashutosh Saxena |
|
|
|
Andrea Censi |
|
|
|
Albert Diosi’s small robot platform |
|
|
|
FabMAP 2.0 video SLAM |
|
|
|
Mision Lab sw |
http://www.cc.gatech.edu/aimosaic/robot-lab/research/MissionLab/ |
|
|
ACT research group |
|
|
|
Andrew Comport ‘s visual SLAM |
|
|
|
RI CMU bio robotics lab |
|
|
|
Oscar Martinez Mozos |
|
|
|
MMC Lab |
http://www.lienhart.de/Prof._Dr._Rainer_Lienhart/Welcome.html |
|
|
Laboratory of Perceptual Robotics MIT |
|
|
|
Robotics and Automation Laboratory, Pontifica Universidad Catolica de Chile |
|
|
|
RRLIB – The Robotics Research Library |
|
|
|
Leg Laboratory MIT |
|
|
|
Nakamura Laboratory |
|
|
|
SLAM Benchmarking |
http://kaspar.informatik.uni-freiburg.de/~slamEvaluation/index.php |
|
|
Artificial Perception for Intelligent Systems and Robotics Institute of Systems and Robotics - University of Coimbra |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EVOLUTIONARY COMPUTATIONS |
||
|
|
De Jong's test suite |
|
|
|
GeatBOX |
|
|
|
Shubert Benchmark function |
http://www-optima.amp.i.kyoto-u.ac.jp/member/student/hedar/Hedar_files/TestGO_files/Page1882.htm |
|
|
Test Problems |
|
|
|
Simon Fraser University |
|
|
|
Global Optimization by Repulsive Particle Swarm method |
|
|
|
SOMA optimizer |
|
|
|
The Cross-Entropy Toolbox |
|
|
|
Ralf Salomon - publications |
|
|
|
RGA - algorithm for black box global optimization |
|
|
|
Rosenbrock Method |
http://www.applied-mathematics.net/optimization/rosenbrock.html |
|
|
GEATbx: Genetic and Evolutionary Algorithm Toolbox for use with MATLAB |
|
|
|
PSOVis Particle Swarm Optimization |
|
|
|
Bukin A.D., (1997), New Minimization Strategy For Non-Smooth Functions, Budker Institute of Nuclear Physics, 1997, Novosibirsk |
http://www.inp.nsk.su/activity/preprints/oldwww/texts/p97_79.ps |
|
|
SCI2S Thematic Public Websites SGA, (DE, OBDE, SaDE, JADE, DEGL, SFSLDE), Simulated Annealing, Memetic Algorithms |
|
|
|
A.E. Eiben Evolutionary computations, Multi-parent recombination, Parameter Control, Parameter Tuning, Artificial Life, Evolutionary Robotics, Evolutionary Art |
|
|
|
Janez Brest, jDE
|
|
|
|
University of Granada Global optimization, Souce codes |
|
|
|
Efrén Mezura-Montes Global optimization |
|
|
|
Josef Tvrdík, Global optimization problems, DE optimization, Matlab libraries, C++ libraries |
|
|
|
António Manso, Genetic algorithms, Multi population genetic algorithms |
|
|
|
Stefan Wagner, Global Optimization, HeuristicLAB software |
|
|
|
DeJong K., An analysis of the behavior of a class of genetic adaptive systems, Ph.D. thesis, University of Michigan, 1975 |
|
|
|
Laboratory of Information Processing, Department of Information Technology, Lappeenranta University of Technology, Lappeenranta, Finland |
|
|
|
Pohlheim H., GEATbx.com, genetic and evolutionary algorithm toolbox for Matlab,December 2006 |
|
|
|
Molga M., Smutnicki C. Test functions for optimization needs |
www.zsd.ict.pwr.wroc.pl/files/docs/functions.pdf https://www.robertmarks.org/Classes/ENGR5358/Papers/functions.pdf |
|
|
Shubert Function |
http://www-optima.amp.i.kyoto-u.ac.jp/member/student/hedar/Hedar_files/TestGO_files/Page1882.htm |
|
|
Ackley D. H., A Connectionist Machine for Genetic Hillclimbing, Kluwer Academic, Publishers, 1987. |
|
|
|
Mishra S.K., Performance of Differential Evolution and Particle Swarm Methods on Some Relatively Harder Multi-modal Benchmark functions, Department of Economics, North-Eastern Hill University, Shillong, Meghalaya (India). |
|
|
|
Zelinka Ivan, Department of Informatics and Artificial Intelligence, Faculty of Applied Informatics, Tomas Bata Univerzity in Zlin |
|
|
|
Nikos Drakos, Computer Based Learning Unit, University of Leeds, 1993, 1994, 1995, 1996, Ross Moore, Mathematics Department, Macquarie University, Sydney, 1997, 1998, 1999. Botev Zdravko, Kroese Dirk, Liu Jenny, Nariai Sho, Taimre Thomas, The Cross-Entropy Toolbox, December 17, 2004, The University of Queensland, Australia |
|
|
|
Rosenbrock H. H., An Automatic Method for Finding the Greatest or Least Value of a Function, Computer Journal, Vol 3, pp. 175-184, 1960. |
http://web.ift.uib.no/~antonych/RGA4.html#dixon http://www.applied-mathematics.net/optimization/rosenbrock.html |
|
|
Salomon R., Reevaluating genetic algorithm performance under coordinate rotation of benchmark functions, BioSystems, vol. 39, pp. 263-278, 1996. |
|
|
|
Kwiesielewicz M., Technical University of Gdansk, Faculty of Electrical and Control Engineering, Control Engineering Department, G. Narutowicza 11/12, PL-80-952 Gdansk, Poland |
|
|
|
DeCastro L. N., Timmis J., An Artificial Immune Network for Multimodal Function Optimization, Proceedings of IEEE Congress on Evolutionary Computation (CEC'02), vol. 1, pp. 699-674, 2002, May, Hawaii. |
|
|
|
Bukin A.D., (1997), New Minimization Strategy For Non-Smooth Functions, Budker Institute of Nuclear Physics, 1997, Novosibirsk, |
http://www.inp.nsk.su/activity/preprints/oldwww/texts/p97_79.ps |
|
|
University of Tokyo, Hasegawa laboratory |
|
|
|
Classic Benchmark problems |
http://www.cs.cmu.edu/afs/cs/project/jair/pub/volume24/ortizboyer05a-tml/node6.html |
|
|
Eric Rollins Cellular Automata, EA, Parallel Programming |
http://www.mindspring.com/~eric_rollins/
|
|
|
Mark Ebner EA computations |
https://www.math-inf.uni-greifswald.de/mathe/index.php/mitarbeiter/608-prof-marc-ebner |
|
|
Giovanni Iacca, Compact DE |
|
|
|
Kimeme Optimization Software Linux and Windows x32 x64 |
|
|
|
Evolutionary Optimisation in Uncertain or Dynamic Environments |
|
|
|
Neural Net(s) |
|
|
|
University of Amsterodam |
|
|
|
Natural Selection |
|
|
|
Nikolaus Hansen |
|
|
|
C++ evolutionary computation components framework |
|
|
|
C.I. Lab, PSO resources |
|
|
|
Kanpur Genetic Algorithms Laboratory |
|
|
|
Daniela Zaharie,DE |
|
|
|
Qingfu Zhang, DE |
|
|
|
The Marulan Datasets, Australian Centre for Field Robotics |
|
|
|
Marco Montes De Oca, Frankenstein’s PSO |
|
|
|
Polar Bear Optimizer, in C#, verified by author |
|
|
|
Bison Algorithm, MS VS 2019 C# .NET 4.7.2 WinForms |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EVOLUTIONARY ROBOTICS |
||
|
|
Evolutionary robotics main page |
|
|
|
Evolutionary robotics Wikipedia |
|
|
|
Dario Floreano |
|
|
|
Stefano Nolfi |
|
|
|
Vasant Honavar |
|
|
|
Andrew Nelson, Evolutionary Robotics |
http://www.nelsonrobotics.org/evolutionary_robotics_web/bibliography.html |
|
|
Craig Reynolds |
|
|
|
|
|
|
|
|
|
|
GENERAL INTERESTING LINKS |
||
|
|
.NET library, Video capture, Math, ImageProcessing, Neural Networks. FuzzyLogic etc. |
http://code.google.com/p/aforge/
|
|
|
Accord .NET Framework Extension of AForge.NET Framework |
|
|
|
Open Asset Import Library |
|
|
|
Multiple Precision Integers and Rationals |
|
|
|
The GNU Multiple Precision Arithmetic Library |
|
|
|
A GNU Multi-Precision Library for .NET |
|
|
|
Computational Geometry: Algorithms and Applications |
|
|
|
The GNU MPFR Library |
|
|
|
Wikipedie List of Numerical Libraries |
|
|
|
Extreme optimization profi |
|
|
|
Free C/C++ Sources for Numerical Computation |
|
|
|
Open C++ libraries Robotics, SLAM |
|
|
|
SURF algorithm |
|
|
|
SIFT Keypoint Detector |
|
|
|
.NET Math Library |
|
|
|
.NET MS Connect Math Library |
|
|
|
Linear Algebra Pack |
|
|
|
C++ FAQ - How accurate floating point comparison is? |
http://www.softwareandfinance.com/CPP/FAQ_Floating_Point.html |
|
|
Why don't floating point comparisons work? |
|
|
|
Comparing floating point numbers |
http://www.cygnus-software.com/papers/comparingfloats/Comparing%20floating%20point%20numbers.htm |
|
|
What Every Computer Scientist Should Know About Floating-Point Arithmetic |
http://download.oracle.com/docs/cd/E19957-01/806-3568/ncg_goldberg.html |
|
|
Humanoid walking SW |
|
|
|
Carlos Oliveira |
|
|
|
Eberhard Karls Universität Tübingen |
|
|
|
HPGL Viewer (PLT Viewer) |
|
|
|
Swplot (PLT Viewer) |
|
|
|
FPLOT (PLT Viewer) |
http://www.webring.org/l/rd?ring=caduser;id=49;url=http%3A%2F%2Fwww%2Efplot%2Ecom%2F |
|
|
ViewCompanion Pro (PLT Viewer) |
|
|
|
ETE Cad (PLT Viewer) |
|
|
|
PloComp (PLT Viewer) |
|
|
|
AB Viewer (PLT Viewer) |
|
|
|
Cadviewer (PLT Viewer) |
|
|
|
RxView (PLT Viewer) |
|
|
|
Professor A. D. Marshall |
|
|
|
Pedestrian Detection Lab. |
|
|
|
Daphne Coller |
|
|
|
Matthew Kusner – lawn mower |
|
|
|
Mitsubishi Electric Technical Reports related to Machine Learning |
http://www.merl.com/publications/?pub_type=Technical+Reports&pub_area=Machine%20Learning |
|
|
Vysoká Škola Báňská – Technická Universita Ostrava Fakulta Strojní, Katedra Robotechniky |
|
|
|
Robot System web |
|
|
|
Jonas Witt, Hamburg University of Technology |
|
|
|
AI Online Code repository |
|
|
|
C++ FAQ - How accurate floating point comparison is? |
http://www.softwareandfinance.com/CPP/FAQ_Floating_Point.html |
|
|
Why doesn't my floating-point comparison work? |
http://www.cs.technion.ac.il/users/yechiel/c++-faq/floating-point-arith.html |
|
|
Comparing floating point numbers |
http://www.cygnus-software.com/papers/comparingfloats/Comparing%20floating%20point%20numbers.htm |
|
|
What Every Computer Scientist Should Know About Floating-Point Arithmetic |
http://download.oracle.com/docs/cd/E19957-01/806-3568/ncg_goldberg.html
|
|
|
Makerere University School of Computing |
|
|
|
Advanced Institute of Science and technology Kaist |
|
|
|
MIT Robot Locomotion Group |
|
|
|
Jean-Bernard Hayet, CIMAT |
|
|
|
Obotics Courses |
|
|
|
VL Feat .org, SIFT, KDTree, SVM etc. |
|
|
|
Open SIFT |
|
|
|
ACR |
|
|
|
MRPT Development in robotics + datasets |
|
|
|
Dirk Holz SLAM |
|
|
|
Ph.D. thesis on Evolutionary Multiobjective Optimization |
|
|
|
Maxon Motors |
|
|
|
CSIRO ICT research Centre |
|
|
|
IEEE floating point ? |
http://www.yosefk.com/blog/consistency-how-to-defeat-the-purpose-of-ieee-floating-point.html |
|
|
LRIA laboratories |
|
|
|
Roland Jan Geraerts, Path planning |
|
|
|
Jeff Orkin, AI Game Books |
|
|
|
Online code repository |
|
|
|
NAG library |
|
|
|
Accord .NET library |
|
|
|
D. Xiang Bai, Animals silhouettes dataset |
|
|
|
THOMSON & REUTERS SCIENCE CITATION INDEX EXPANDED |
http://ip-science.thomsonreuters.com/mjl/publist_sciex.pdf http://science.thomsonreuters.com/cgi-bin/jrnlst/jlresults.cgi?PC=D&Alpha=I |
|
|
Web of Science |
|
|
|
WoS + SCOPUS Conferences |
|
|
|
SCOPUS index |
https://blog.scopus.com/posts/titles-indexed-in-scopus-check-before-you-publish https://www.scopus.com/sources.uri?DGCID=Scopus_blog_post_check2015 http://www.elsevier.com/online-tools/scopus/content-overview https://files.sciverse.com/documents/xlsx/title_list.xlsx |
|
|
Cite Factor List |
http://www.citefactor.org/journal-impact-factor-list-2014.html http://www.letpub.com/index.php?page=journalapp http://www.omicsonline.org/open-access-journals-impact-factors.php?gclid=CInLneiPmM4CFYU_GwodHHYIiA |
|
|
SCIMAGO, Scimago Journal & Country Rank |
|
|
|
Top Journals for Computer Science and Electronics |
|
|
|
Conferences ranking |
|
|
|
Cyril Stachniss. How to write a scientific paper |
|
|
|
Scientific Results Definition, Czech Republic |
|
|
|
GII-GRIN-SCIE (GGS) Conference Rating |
|
|
|
Conferences in Czech Republic |
|
|
|
LetPub |
|
|
|
CitEc Org |
|
|
|
WoS Help |
https://images.webofknowledge.com/WOKRS5251R3/help/WOS/hp_database.html |
|
|
Some journals, EA |
|
|
|
Taylor Francis |
|
|
|
Scientific result definition |
|
|
|
Springer impacted journals |
http://www.springer.com/computer/impact+factor+journals+computer+science?SGWID=0-1743318-12-863108-0 |
|
|
Open Access Journals Impact Factor List |
http://www.omicsonline.org/open-access-journals-impact-factors.php?gclid=CIb25bXdhs0CFRYTGwodCHYM1w |
|
|
CDER France |
|
|
|
KITTI Vision Benchmark Suite |
|
|
|
Computer Vision Group TUM Department of Informatics
|
|
|
|
Robotics Laboratory, Hiroshima University Hyper Human Vision |
http://www.robotics.hiroshima-u.ac.jp/hyper_human_applications/index.php |
|
|
BS-tree, KD-tree, Quad Tree, RedBlack Tree |
|
|
|
Bison Algorithm, MS VS 2019 C# .NET 4.7.2 WinForms |
|
|
|
ROC diagram creation (CZE), EER, FAR, FRR |
|
|
|
KITTI Vision Benchmark Suite! |
|
|
|
Autonomous Vision Group (AVG) |
|
|
|
Software optimization resources |
|
|
|
Beall's List of Potential Predatory Journals and Publishers |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|



|
|
||
|
RobomapStudio is distributed with the support of the University of Freiburg, Dept. of Computer Science
|
||
|
|
||
|
|
||
|
|
(REF0002) http://www.centerspace.net/blog/nmath/customer-story-evolutionary-robotics-using-nmath/ 1:
|
|
|
|
(REF0003) http://www.centerspace.net/blog/evolutionary-robotics/ 1:
|
|
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||























































|
Journal Papers
|
|
|
· Moravec J. (2015). A Comparative Study: L1-norm vs. L2-norm, point-to-point vs. point-to-line Metric, Evolutionary Computation vs. Gradient Search, Applied Artificial Intelligence, vol. 29, no. 2, pp. 164 – 210 |
A: |
|
· Moravec J., Pošík P. (2014). Global Robot Localization Under Noise Stress Utilizing EA Methods and Semi-semantic Classification of a Known Environment, Applied Artificial Intelligence, vol. 28, no. 4, pp. 360 – 417, (REF0004) |
A: 1: |
|
· Moravec J., Pošík P. (2014). A Comparative Study: The Effect of the Perturbation Vector Type in the Differential Evolution Algorithm on the Accuracy of Robot Pose and Heading Estimation, Evolutionary Intelligence Journal, vol. 6, no. 3, pp. 171-191, (REF0005) |
A: 1: |
|
· Moravec J., (2012). Map Building of Unknown Environment Using L1-norm, Point-to-Point Metric and Evolutionary Computation, Polibits - Research Journal on Computer Science and Computer Engineering with Applications, vol. 46, pp. 29-38, (REF0006) |
A: 1: |
|
· Moravec J., (2012). Cascaded Evolutionary Estimator for Robot Localization, International Journal of Applied Evolutionary Computation, vol. 3, no. 3, pp. 33-61, (REF0007) |
A: 1: |
|
· Moravec J., (2000). Single-chip Multi-Processor Communication With PC, Sdělovací Technika, vol. 48, no. 11, (REF0008) |
1: |
|
Conference Papers |
|
|
|
|
|
· Moravec J., (2001). Continuous Robot Localization in Known Environment Using Genetic Algorithms, The 10th IEEE International Conference on Fuzzy Systems FUZZ IEEE 2001, Melbourne, Australia, p.6 (†poster), (REF0009) |
1: |
|
· Moravec J., Přeučil, L., (2001). Map Building of Unknown Environment Based on Laser Range Finder, 3rd International Conference on Mechatronics and Biomechanics 2001, Třešť, pp. 221-228, ISBN 80-01-0235-4, University of Brno, Institute of Solid Mechanics, (REF0010) |
1: |
|
Workshop Papers |
|
|
|
|
|
· Moravec J., (2002). Robot Localization using Genetic Algorithms, Proceedings of The CTU Workshop 2002, p. 3, ISBN 80-01-02511-X, (REF0011) |
1: |
|
· Moravec J., Přeučil, L., (2001). Advanced Approach to Sensor Data Processing for Autonomous Systems, CTU Workshop 2001, vol. A, p. 2, ISBN 80-01-02335-4, (REF0012) |
1: |
|
· Moravec J., Přeučil, L., (2001). A Novel Approach to Accurate Mobile Robot Positioning, Poster 2001, The 5th International Student Conference on Electrical Engineering, CTU Poster 2001, p.30, Prague, (REF0013) |
1: 1: |
|
Technical Reports |
|
|
|
|
|
· Moravec J., Přeučil, L., (2001). Movement and Continual Localization in Known Environment, Technical Report, CTU GLR 59/01, p.12, (REF0014) |
1: |
|
· Moravec J., Přeučil, L., (2001). Methods of Mobile Robot Positioning in Known Environment, Technical Report, CTU GLČ 52/00, p.18, (REF0015) |
1: |
|
· Moravec J., Přeučil, L., (2000). Advanced Methods of Sensorial Data Processing and Way of a Known Environment Representation in Autonomous Mobile Systems, Technical Report, CTU 2000, p.6, (REF0016) |
1: |
|
Theses |
|
|
|
|
|
· Moravec J., (2014). Evolutionary Algorithms in Mobile Robotics, PhD Thesis, Czech Technical University in Prague, Faculty of Electrical Engineering, Department of Cybernetics, IMR Group, p. 331, (REF0017) |
1: CZE |
|
· Moravec J., (2002). Methods of Robot Localization in Indoor Environment, PhD Thesis – obligatory minimum, Czech Technical University in Prague, Faculty of Electrical Engineering, Department of Cybernetics, IMR Group, p. 44, (REF0018) |
1: ENG |
|
· Moravec J., (1998). Selected Applications in Area of Construction and Operation of Astronomical Telescopes, Master Thesis, West Bohemia University, Faculty of Applied Sciences, Department of Cybernetics, p. 196, (REF0019) |
1: CZE |
|
· Moravec J. (1991). Astrocom, Stellar atlas for PC, SPS Nové Město nad Metují, p. 320, (REF0020) |
1:
CZE |
|
· Moravec J., (1992) Programmer Libraries: Scanty Basic, SPS Nové Město nad Metují, p. 243, (REF0021) |
1: CZE |
|
|
|
|
1: fastshare.cz, 2: figshare.com, 3: onedrive.live.com A:, B:, C:, …, : available web sites which correspond with the given information source |
|
|
|
|
ORCID: 0000-0003-2974-1104, ScopusAuthorID: 55959855700, ResearcherID: AAH-2006-2021 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|


USEFUL NOTES
|
At maintenance time ‘http://www.robomap.4fan.cz/’ is not available. Some part of (RS) may be unavailable or you can see ‘ERROR 404 – page not found.’ message or something similar. Maintenance takes 1-2 hours. |
|
|

1:![]() 2:
2:![]() 3:
3:![]() 4:
4:![]() 5:
5: ![]() 6:
6: ![]() 7:
7: ![]() 8:
8: ![]() 9:
9: ![]()

www.mojeid.cz #overenomojeid overeno.mojeid.cz.
---------------------------------------------------------------------------------------------------------------------------------------------------------------